VR 基础
About 3 min
VR 基础
VR的三个目标
- 沉浸性
- 交互性
- 无感知性
感知输入设备
手部追踪
手套、手柄
眼部追踪
腕带
解放双手
动捕衣服
身上关键的关节有捕捉点,有助于捕捉身体动作
六个自由度
HMD
数学原理
高斯成像公式计算:
M: 放大的比例
改变成像大小,通过改变
Image Formation
HMD,是正立放大虚像
实像需要一个成像盘才能看到,虚像不需要成像盘,眼睛可以直接看到
第一次作业,会与下次课内容相关,要听
凸透镜成像原理是指凸透镜对光具有汇聚作用,使平行于主光轴的入射光线经过折射后会聚在一点,称为焦点。根据惠更斯原理,凸透镜所成像上各点均可看作光源,所以人眼可以看到透镜另一侧的像。
凸透镜成像规律是指物体放在焦点之外,在凸透镜另一侧成倒立的实像,实像有缩小、等大、放大三种。
这是一个物距大于2倍焦距的情况,从物体顶端发出的两条特殊光线(一条平行于主光轴,一条通过光心)经过凸透镜折射后相交于像的位置。
大于2f,倒立缩小的实像。
2f,倒立等大
像在1倍焦距和2倍焦距之间,成倒立、放大的实像。
当物距小于f时:像呈现正立,放大的虚像
因为是光线的反向延长线相交得到的像所以只能在凸透镜右侧观察虚像,左侧是看不到像的
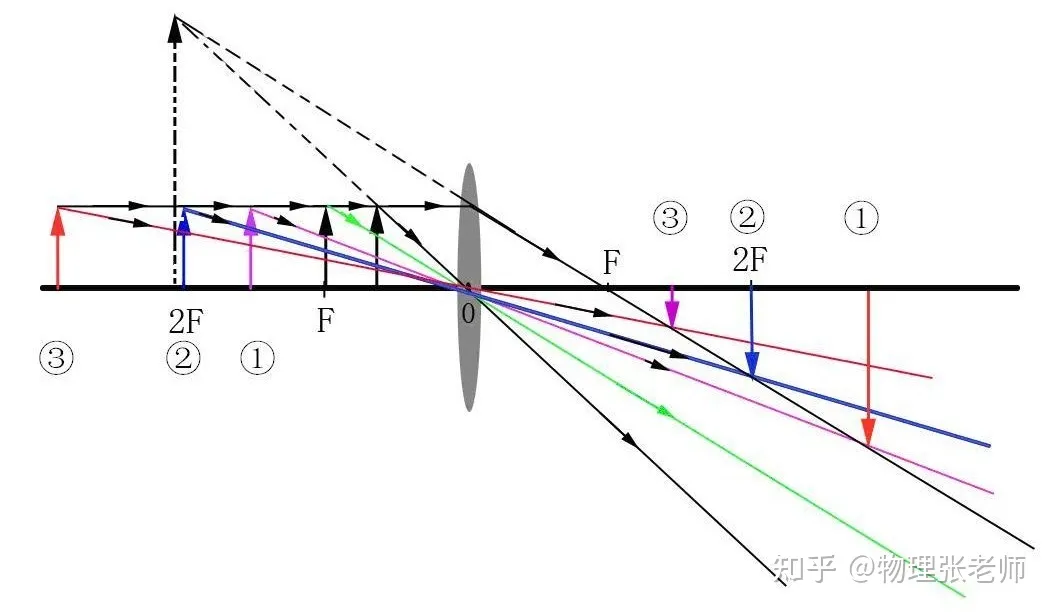
一倍焦距分虚实,二倍焦距分大小
物近像远像变大(实),物近像近像变小(虚)
实像总是异侧倒。虚像同侧正立好
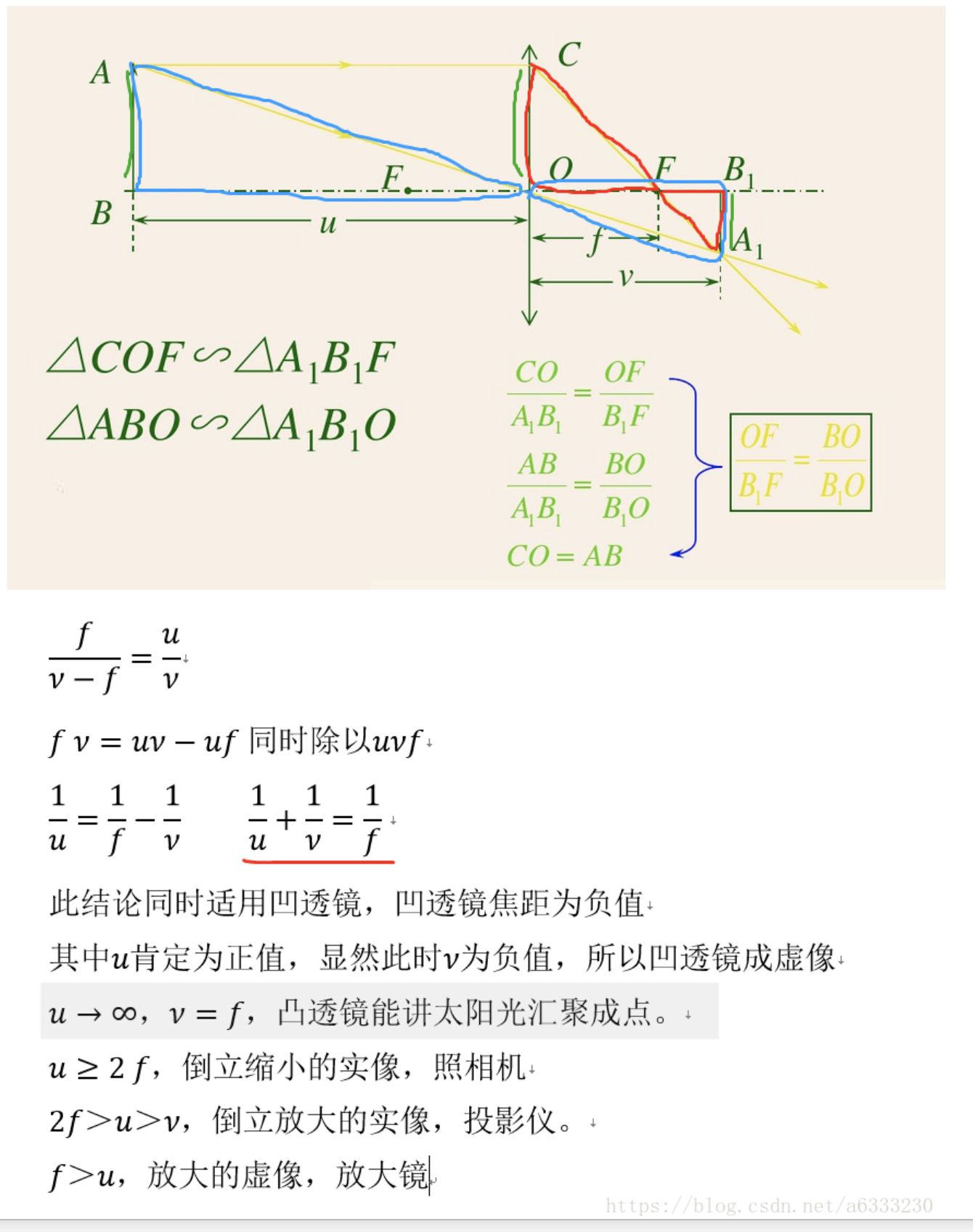
- 对于物体和像在垂直光轴上的情况,物距u、像距v和焦距f之间有如下关系:
1/u+1/v=1/f。
高斯薄透镜公式推导:
- 假设有一个薄透镜,其焦点分别为F1和F2,物体位于透镜左侧的P点,像位于透镜右侧的Q点。
- 从P点发出的一束平行光线经过透镜后会汇聚于F2点,因此可以认为Q点是从F2发出的一束光线经过透镜后到达P点的像。
- 同理,从P点发出的一束经过F1点的光线经过透镜后会平行于光轴射出,因此也可以认为Q点是从P点发出的一束光线经过F1和透镜后到达无穷远处的像。
- 根据相似三角形的性质,可以得到以下比例关系:
PF1/F1Q=PF2/F2Q。 - 将物距u、像距v和焦距f代入上式,并取绝对值,可以得到:
u/f=v/f-1。 - 整理上式,就可以得到:
1/u+1/v=1/f。
物距u、像距v和焦距f
视觉细胞:
- Cones视锥:
- Rods视杆:光的强度、物体移动,处理颜色,大多数功能都是他实现的
高斯成像公式计算:
M: 放大的比例
改变成像大小,通过改变
:屏幕宽度
ipd:瞳距
练习题
- 计算虚像距离眼睛的距离
- 右眼为例,水平角度多大
第一问:
第二问:
视野范围:41*2=82
远远小于人眼的200度
动态区域
为什么照片照出来照片的感觉与自己看到的东西不太一样,结合Dynamic Range来解释一下
惯用眼:射击的时候用惯用眼瞄准