Body Animation
Body Animation
- Main Approaches to Animation
- Motion Editing Techniques
- Arc Length Parameterization
Keyframe
Animation
Animation=Post(time)
Collections of motion curves
- Single degree of freedom(DOF)
- Single Joint (up to 6 DOF)
- 3 rotation
- 3 translation (if root or changing bone lengths)
- Entire body
Motion curve representation
- Usually cubic splines
- Bezier (Catmul-Rom) splines
- B-Splines
Main Approaches to Animation
Keyframe
Key poses specified at selected points in time
Spline curves used to interpolate body position and orientation between key poses
Mocap
motion data representing position of root and joint angles as a function of time
- No splines -> every frame a key
Usually generated by capturing a live actor’s performance
Procedural
IK-based (Ubisoft)
Optimization-based
Physically-based (Ragdoll)
- Motions generated based on the law of physics
Pose Space
Channels
Many animation systems typically separate the n-dimensional animation into 1-dimensional curves (one for each DOF) called “Channels”
- a channel typically stores the value of a scalar function over some 1D domain (time, distance, health, etc).
- Can be a joint angle or arbitrary parameter value (such as mass)
- normally refers to “scripted” data for a DOF
- does not refer to the more general case of a DOF changing over time due to physics, procedural animation, etc.
IK can change length of link
Array of channels
An animation can be stored as an array of channels
an animation is stored as a 2D array of floats (NumDOFs x NumFrames)
Array of Poses
- An alternative way to store an animation is as an array of poses
- This also forms a 2D array of floats (NumDOFs x NumFrames)
Poses vs. Channels
Which is better
- Array of poses is great for playing back relatively simple animations that need maximum performance. This is often the case in many video games
- Array of channels is used when flexibility is important or generality is valued over raw performance
The bottom line:
- Poses are faster
- Channels are more flexible and can potentially use less memory
Main Editing Techniques
- Interactive Posing
- Adding constraints
- Position
- Orientation
- Optimizing motion over a sequence of poses
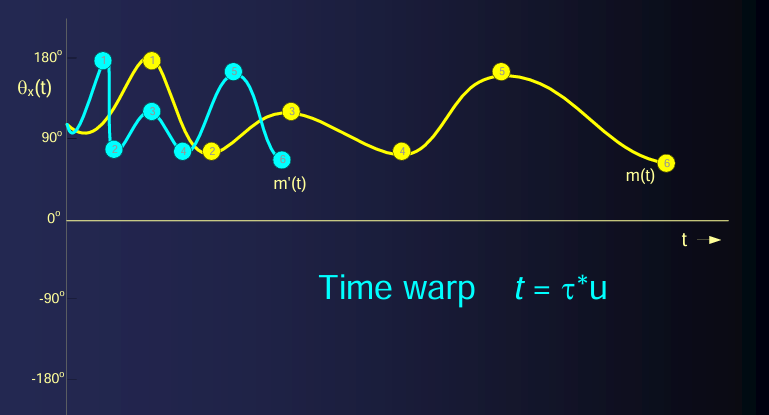
Warp
Change Playback speed
Given motion curve
is the new independent variable (i.e. normal time)
controls the speed of motion
- To speed up motion adjust time and/or spline knots
- where s > 1
- To slow down motion adjust time and/or spline knots
- where 0 < s < 1
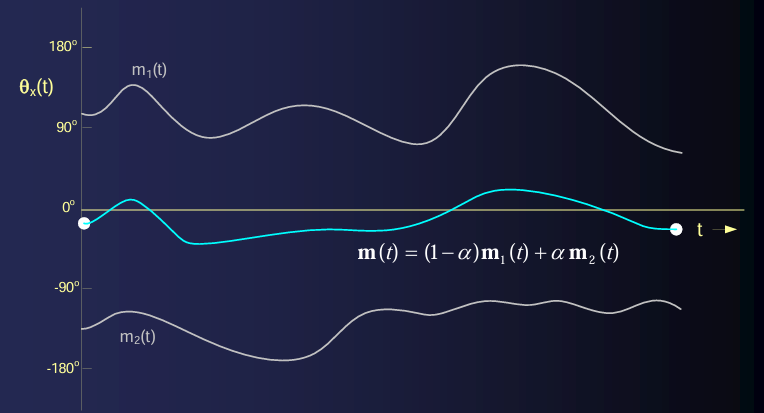
Blending
blend two or more motion (lerp)
Allows two motion curves m1(t) and m2(t) to be interpolated
Layering (compositing)
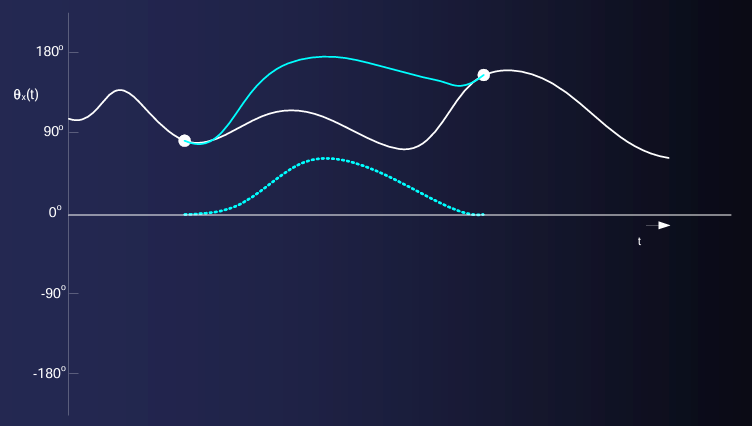
Cross Dissolve
transition from one animation to another (lerp)
linear blend
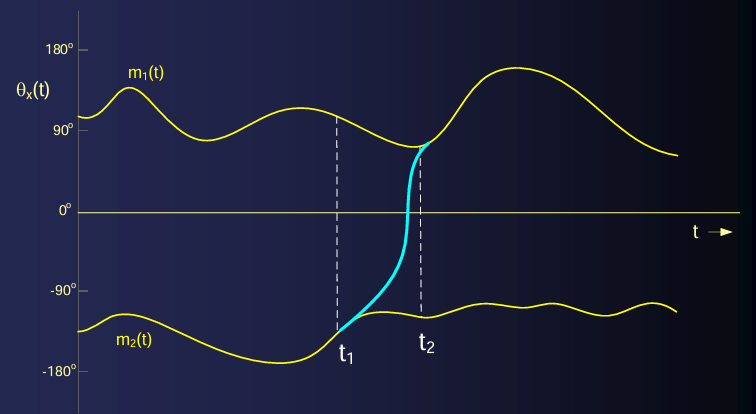
Walk cycle
run cycle
Transition form walk to run
脚着地
Arc Length Parameterization
Animation Guide
Problem – After playing an animation with root translation, the root joint will snap back to the initial position and orientation after playing the animation Solution – Add a virtual joint called a “Guide” as a parent of root joint – As a result, root position and orientation transforms are now with respect to the guide frame of reference – At the end of each animation, update the guide joint position to the current position of the character in the world
Foot IK
Allow characters walk over uneven terrain
IK target
Root position
- determine which foot is lower
- Update vertical position of root joint
Foot Position
- use Limb IK with Lfoot_target and Rfoot_target to position feet
Animation Blending
We can define blending operations that affect poses
A blend operation takes one or more animations/poses as input and generates one animation/pose as output
Parameters such as speed, direction, angle, height etc. are used to control the blend
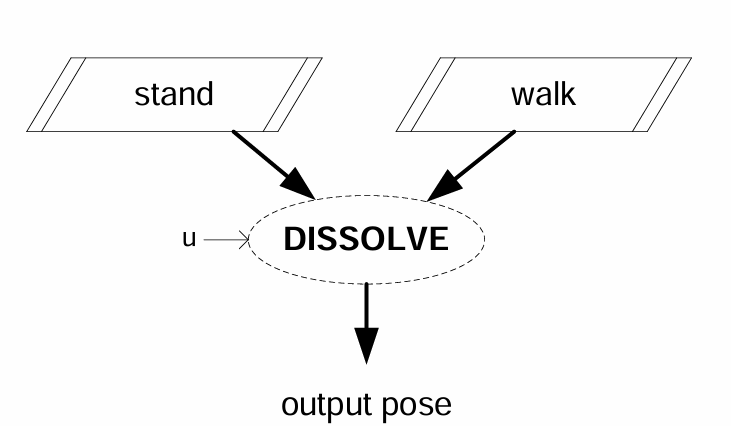
Cross Dissolve
The most common and useful pose blend operation is the ‘cross dissolve’ of two poses p1 and p2
It is ok for Euler Angles to use Lerp
… but quaternions need to use … Slerp
Handling Angles
If a DOF represents an angle, we need to have the interpolation check for crossing the 0/360 boundary
- Always want to take the shortest path
- Assumes angles range from 0 to 360
if (theta1-theta2 > 180) theta=lerp(theta1-360,theta2,u);
else if (theta2-theta1 > 180) theta=lerp(theta1,theta2-360,u);
else theta=lerp(theta1,theta2,u);Quaternions
Same goes for quaternions. Since there are always two solutions, we need to force the interpolation to go the ‘short way’.
if (q1 * q2 > 0) q=slerp(q1,q2,u);
else q=slerp(-q1,q2,u);Stand to Walk
Consider a situation where we want a character to blend from a stand animation to a walk animation
Basic Math Blend Operations
- Add
- Subtract
- Scale
Body Turn
As an example of math blending operations, consider a character that walks and turns One approach to achieving this is to have an underlying walk animation and ‘layer’ (add) some body turn on top of it We use a ‘turn_right’ animation and a ‘default’ straight forward walk animation as building blocks The subtract blender gives us the difference between the turn_right and default walk animations at each point in time We then scale this turning delta and add it on top of the underlying walk animation. The scale factor value (u) can be based on how sharply the character should turn (-1…1)
- Bilinear Blend
- Combine Blender
- Mirror Blender