数据结构
数据结构
SDS
SDS 动态字符串,字符串是 Redis 中最常用的一种数据结构。Redis 中保存的 Key 是字符串,value 往往是字符串或者字符串的集合。
结构
struct __attribute__ ((__packed__)) sdshdr16 {
uint16_t len;
uint16_t alloc;
unsigned char flags;
char buf[];
};
struct __attribute__ ((__packed__)) sdshdr32 {
uint32_t len;
uint32_t alloc;
unsigned char flags;
char buf[];
};- len,记录了字符串长度。这样获取字符串长度的时候,只需要返回这个成员变量值就行,时间复杂度只需要 O(1)。
- alloc,分配给字符数组的空间长度。这样在修改字符串的时候,可以通过
alloc - len计算出剩余的空间大小,可以用来判断空间是否满足修改需求,如果不满足的话,就会自动将 SDS 的空间扩展至执行修改所需的大小,然后才执行实际的修改操作,所以使用 SDS 既不需要手动修改 SDS 的空间大小,也不会出现前面所说的缓冲区溢出的问题。 - flags,用来表示不同类型的 SDS。一共设计了 5 种类型,分别是 sdshdr5、sdshdr8、sdshdr16、sdshdr32 和 sdshdr64。之所以 SDS 设计不同类型的结构体,是为了能灵活保存不同大小的字符串,从而有效节省内存空间。比如,在保存小字符串时,结构头占用空间也比较少。
- buf[],字符数组,用来保存实际数据。不仅可以保存字符串,也可以保存二进制数据。
总的来说,Redis 的 SDS 结构在原本字符数组之上,增加了三个元数据:len、alloc、flags,用来解决 C 语言字符串的缺陷。
如果不想编译器使用字节对齐的方式进行分配内存,可以采用了 __attribute__ ((packed)) 属性定义结构体,这样一来,结构体实际占用多少内存空间,编译器就分配多少空间。
扩容
允许的最长的字符长度是 255 个字节
假如我们要给 SDS 追加一段字符串“,Ay”,这里首先会申请新内存空间:
- 如果新字符串小于 1M,则新空间为扩展后字符串长度的两倍+1
- 如果新字符串大于 1M,则新空间为扩展后字符串长度+1M+1。称为内存预分配。
对比 C String
Redis 没有直接使用 C 语言中的 String,因为 C 语言字符串存在很多问题
- 获取字符串长度的需要通过遍历,On
- 非二进制安全(用特殊标识标志结束
\0),如果内容有\0会导致提早结束 - 不可修改(本质是定长字符数组,不会动态扩容),可能发生缓冲区溢出
SDS 的优点
- 获取字符串长度的时间复杂度为 0(1)
- 支持动态扩容
- 节省内存/减少内存分配次数
- 二进制安全
IntSet
当一个 Set 对象只包含整数值元素,并且元素数量不大时,就会使用整数集这个数据结构作为底层实现。
IntSet 是 Redis 中 set 集合的一种实现方式,基于整数数组来实现,并且具备长度可变、有序等特征。
结构
typedef struct intset {
//编码方式
uint32_t encoding;
//集合包含的元素数量
uint32_t length;
//保存元素的数组
int8_t contents[];
} intset;升级
倒序扩容
超出编码的时候,升级编码,然后插入
整数集合升级的过程不会重新分配一个新类型的数组,而是在原本的数组上扩展空间,然后在将每个元素按间隔类型大小分割,如果 encoding 属性值为 INTSET_ENC_INT16,则每个元素的间隔就是 16 位。
不支持降级操作,一旦对数组进行了升级,就会一直保持升级后的状态。比如前面的升级操作的例子,如果删除了 65535 元素,整数集合的数组还是 int32_t 类型的,并不会因此降级为 int16_t 类型。
扩容
有序:插入的时候使用的二分查找
特点:
- Redis 会确保 Intset 中的元素唯一、有序
- 具备类型升级机制,可以节省内存空间
- 底层采用二分查找方式来查询
Dict
Redis 是一个键值型(Key-Value Pair)的数据库,我们可以根据键实现快速的增删改查。而键与值的映射关系正是通过 Dict 来实现的。
结构
Dict 由三部分组成,分别是:
哈希表(DictHashTable)、
哈希节点(DictEntry)、
通过链式哈希来解决哈希冲突
字典(Dict)
dictht
typedef struct dictht {
//哈希表数组
dictEntry **table;
//哈希表大小
unsigned long size;
//哈希表大小掩码,用于计算索引值
unsigned long sizemask;
//该哈希表已有的节点数量
unsigned long used;
} dictht;dictEntry
typedef struct dictEntry {
//键值对中的键
void *key;
//键值对中的值
union {
void *val;
uint64_t u64;
int64_t s64;
double d;
} v;
//指向下一个哈希表节点,形成链表
struct dictEntry *next;
} dictEntry;dictEntry 结构里不仅包含指向键和值的指针,还包含了指向下一个哈希表节点的指针,这个指针可以将多个哈希值相同的键值对链接起来,以此来解决哈希冲突的问题,这就是链式哈希。
dict
typedef struct dict {
…
//两个Hash表,交替使用,用于rehash操作
dictht ht[2];
…
} dict;rehash
基本思路
在正常服务请求阶段,插入的数据,都会写入到「哈希表 1」,此时的「哈希表 2 」 并没有被分配空间。
随着数据逐步增多,触发了 rehash 操作,这个过程分为三步:
- 给「哈希表 2」 分配空间,一般会比「哈希表 1」 大 2 倍;
- 将「哈希表 1 」的数据迁移到「哈希表 2」 中;
- 迁移完成后,「哈希表 1 」的空间会被释放,并把「哈希表 2」 设置为「哈希表 1」,然后在「哈希表 2」 新创建一个空白的哈希表,为下次 rehash 做准备。
这个过程看起来简单,但是其实第二步很有问题,如果「哈希表 1 」的数据量非常大,那么在迁移至「哈希表 2 」的时候,因为会涉及大量的数据拷贝,此时可能会对 Redis 造成阻塞,无法服务其他请求。
为了避免 rehash 在数据迁移过程中,因拷贝数据的耗时,影响 Redis 性能的情况,所以 Redis 采用了渐进式 rehash,也就是将数据的迁移的工作不再是一次性迁移完成,而是分多次迁移。
渐进式优化
步骤如下:
- 给「哈希表 2」 分配空间;
- 在 rehash 进行期间,每次哈希表元素进行新增、删除、查找或者更新操作时,Redis 除了会执行对应的操作之外,还会顺序将「哈希表 1 」中索引位置上的所有 key-value 迁移到「哈希表 2」 上;
- 随着处理客户端发起的哈希表操作请求数量越多,最终在某个时间点会把「哈希表 1 」的所有 key-value 迁移到「哈希表 2」,从而完成 rehash 操作。
这样就巧妙地把一次性大量数据迁移工作的开销,分摊到了多次处理请求的过程中,避免了一次性 rehash 的耗时操作。
在进行渐进式 rehash 的过程中,会有两个哈希表,所以在渐进式 rehash 进行期间,哈希表元素的删除、查找、更新等操作都会在这两个哈希表进行。
- 查找一个 key 的值的话,先会在「哈希表 1」 里面进行查找,如果没找到,就会继续到哈希表 2 里面进行找到。
- 新增一个 key-value 时,会被保存到「哈希表 2 」里面,而「哈希表 1」 则不再进行任何添加操作,这样保证了「哈希表 1 」的 key-value 数量只会减少,随着 rehash 操作的完成,最终「哈希表 1 」就会变成空表。
触发时机
rehash 的触发条件跟 负载因子(load factor) 有关系。
负载因子(loadFactor)可以通过下面这个公式计算:
其中:
ht[0].used: 哈希表保存节点数量ht[0].size: 哈希表大小
触发 rehash 操作的条件,主要有两个:
- 当负载因子大于等于 1 时,并且 Redis 没有在执行 bgsave 命令或者 bgrewiteaof 命令,也就是没有执行 RDB 快照或没有进行 AOF 重写的时候,就会进行 rehash 操作。
- 当负载因子大于等于 5 时,此时说明哈希冲突非常严重了,不管有没有有在执行 RDB 快照或 AOF 重写,都会强制进行 rehash 操作。
SkipList
跳表
Zset 对象的底层实现用到了跳表,跳表的优势是能支持平均 O(logN) 复杂度的节点查找。
Zset 对象在使用跳表作为数据结构的时候,是使用由「哈希表+跳表」组成的 struct zset,但是我们讨论的时候,都会说跳表是 Zset 对象的底层数据结构,而不会提及哈希表,是因为 struct zset 中的哈希表只是用于以常数复杂度获取元素权重,大部分操作都是跳表实现的。
结构
typedef struct zskiplistNode {
//Zset 对象的元素值
sds ele;
//元素权重值
double score;
//后向指针
struct zskiplistNode *backward;
//节点的level数组,保存每层上的前向指针和跨度
struct zskiplistLevel {
struct zskiplistNode *forward;
unsigned long span;
} level[];
} zskiplistNode;查询过程
跳表会从头节点的最高层开始,逐一遍历每一层。在遍历某一层的跳表节点时,会用跳表节点中的 SDS 类型的元素和元素的权重来进行判断,共有两个判断条件:
- 如果当前节点的权重「小于」要查找的权重时,跳表就会访问该层上的下一个节点。
- 如果当前节点的权重「等于」要查找的权重时,并且当前节点的 SDS 类型数据「小于」要查找的数据时,跳表就会访问该层上的下一个节点。
要看下一个位置是否符合如上两个条件,符合才会跳过去,不然就下降
如果上面两个条件都不满足,或者下一个节点为空时,跳表就会使用目前遍历到的节点的 level 数组里的下一层指针,然后沿着下一层指针继续查找,这就相当于跳到了下一层接着查找。
层数设置
跳表的相邻两层的节点数量的比例会影响跳表的查询性能。
跳表的相邻两层的节点数量最理想的比例是 2:1,查找复杂度可以降低到 O(logN)
Redis 则采用一种巧妙的方法是,跳表在创建节点的时候,随机生成每个节点的层数,并没有严格维持相邻两层的节点数量比例为 2 : 1 的情况。
具体的做法是,跳表在创建节点时候,会生成范围为[0-1]的一个随机数,如果这个随机数小于 0.25(相当于概率 25%),那么层数就增加 1 层,然后继续生成下一个随机数,直到随机数的结果大于 0.25 结束,最终确定该节点的层数。
这样的做法,相当于每增加一层的概率不超过 25%,层数越高,概率越低,层高最大限制是 64。
虽然我前面讲解跳表的时候,图中的跳表的「头节点」都是 3 层高,但是其实如果层高最大限制是 64,那么在创建跳表「头节点」的时候,就会直接创建 64 层高的头节点。
对比红黑树优势
- 从内存占用上来比较,跳表比平衡树更灵活一些。平衡树每个节点包含 2 个指针(分别指向左右子树),而跳表每个节点包含的指针数目平均为 1/(1-p),具体取决于参数 p 的大小。如果像 Redis 里的实现一样,取 p=1/4,那么平均每个节点包含 1.33 个指针,比平衡树更有优势。
- 在做范围查找的时候,跳表比平衡树操作要简单。在平衡树上,我们找到指定范围的小值之后,还需要以中序遍历的顺序继续寻找其它不超过大值的节点。如果不对平衡树进行一定的改造,这里的中序遍历并不容易实现。而在跳表上进行范围查找就非常简单,只需要在找到小值之后,对第 1 层链表进行若干步的遍历就可以实现。
- 从算法实现难度上来比较,跳表比平衡树要简单得多。平衡树的插入和删除操作可能引发子树的调整,逻辑复杂,而跳表的插入和删除只需要修改相邻节点的指针,操作简单又快速。
skiplist这么多好处,为什么mysql要用B+Tree
因为数据库每次访问结点需要进行IO操作费时,故需要减少访问结点的次数,B+Tree的深度低,可以有效减少IO次数
List
双向链表
缺点:
内存碎片,
链表每个节点之间的内存都是不连续的,意味着无法很好利用 CPU 缓存。能很好利用 CPU 缓存的数据结构就是数组,因为数组的内存是连续的,这样就可以充分利用 CPU 缓存来加速访问。
内存开销
每个链表节点的值都需要一个链表节点结构头的分配,内存开销较大。
结构
listNode
双向链表
typedef struct listNode {
//前置节点
struct listNode *prev;
//后置节点
struct listNode *next;
//节点的值
void *value;
} listNode;list
list 结构为链表提供了链表头指针 head、链表尾节点 tail、链表节点数量 len、以及可以自定义实现的 dup、free、match 函数。
typedef struct list {
//链表头节点
listNode *head;
//链表尾节点
listNode *tail;
//节点值复制函数
void *(*dup)(void *ptr);
//节点值释放函数
void (*free)(void *ptr);
//节点值比较函数
int (*match)(void *ptr, void *key);
//链表节点数量
unsigned long len;
} list;list 结构为链表提供了链表头指针 head、链表尾节点 tail、链表节点数量 len、以及可以自定义实现的 dup、free、match 函数。
ZipList
压缩列表
缺点:连锁更新
压缩列表的最大特点,就是它被设计成一种内存紧凑型的数据结构,占用一块连续的内存空间,不仅可以利用 CPU 缓存,而且会针对不同长度的数据,进行相应编码,这种方法可以有效地节省内存开销。
但是,压缩列表的缺陷也是有的:
- 不能保存过多的元素,否则查询效率就会降低;
- 新增或修改某个元素时,压缩列表占用的内存空间需要重新分配,甚至可能引发连锁更新的问题。
空间扩展操作也就是重新分配内存,因此连锁更新一旦发生,就会导致压缩列表占用的内存空间要多次重新分配,这就会直接影响到压缩列表的访问性能。
虽然压缩列表紧凑型的内存布局能节省内存开销,
但是如果保存的元素数量增加了,或是元素变大了,
- 会导致内存重新分配,
- 最糟糕的是会有「连锁更新」的问题。
因此,压缩列表只会用于保存的节点数量不多的场景,只要节点数量足够小,即使发生连锁更新,也是能接受的。
虽说如此,Redis 针对压缩列表在设计上的不足,在后来的版本中,新增设计了两种数据结构:quicklist(Redis 3.2 引入) 和 listpack(Redis 5.0 引入)。这两种数据结构的设计目标,就是尽可能地保持压缩列表节省内存的优势,同时解决压缩列表的「连锁更新」的问题。
Listpack
紧凑列表
在 Redis 7.0 中,ziplist 数据结构已经废弃了,所有 ziplist 场景均交由 listpack 数据结构来实现了。
quicklist 虽然通过控制 quicklistNode 结构里的压缩列表的大小或者元素个数,来减少连锁更新带来的性能影响,但是并没有完全解决连锁更新的问题。
因为 quicklistNode 还是用了压缩列表来保存元素,压缩列表连锁更新的问题,来源于它的结构设计,所以要想彻底解决这个问题,需要设计一个新的数据结构。
Redis 在 5.0 新设计一个数据结构叫 listpack,目的是替代压缩列表,它最大特点是 listpack 中每个节点不再包含前一个节点的长度了,压缩列表每个节点正因为需要保存前一个节点的长度字段,就会有连锁更新的隐患。
结构
listpack 采用了压缩列表的很多优秀的设计,比如还是用一块连续的内存空间来紧凑地保存数据,并且为了节省内存的开销,listpack 节点会采用不同的编码方式保存不同大小的数据。
char* lp
listpack 结构:

/* Create a new, empty listpack.
* On success the new listpack is returned, otherwise an error is returned.
* Pre-allocate at least `capacity` bytes of memory,
* over-allocated memory can be shrunk by `lpShrinkToFit`.
* */
unsigned char *lpNew(size_t capacity) {
unsigned char *lp = lp_malloc(capacity > LP_HDR_SIZE+1 ? capacity : LP_HDR_SIZE+1);
if (lp == NULL) return NULL;
lpSetTotalBytes(lp,LP_HDR_SIZE+1);
lpSetNumElements(lp,0);
lp[LP_HDR_SIZE] = LP_EOF;
return lp;
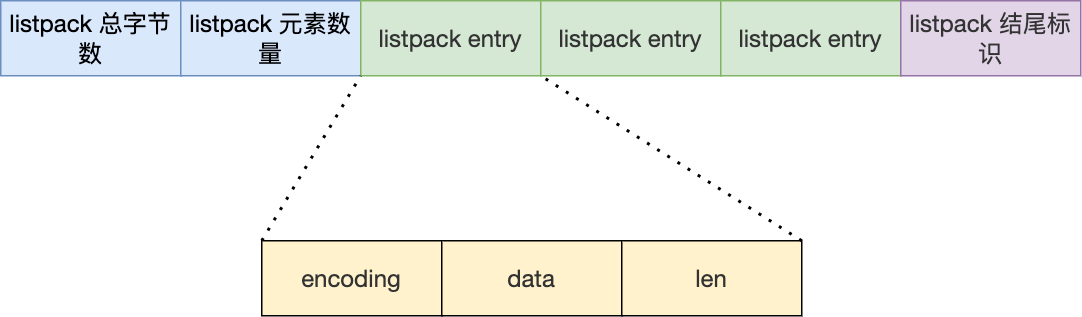
}- listpack 头包含两个属性,分别记录了 listpack
- 总字节数
- 元素数量
- 末尾结尾标识。0xFF
- 图中的 listpack entry 就是 listpack 的节点了。
listpackEntry
每个 listpack 节点结构如下:
typedef struct {
/* When string is used, it is provided with the length (slen). */
unsigned char *sval;
uint32_t slen;
/* When integer is used, 'sval' is NULL, and lval holds the value. */
long long lval;
} listpackEntry;主要包含三个方面内容:
- encoding,定义该元素的编码类型,会对不同长度的整数和字符串进行编码;
- data,实际存放的数据;是字符串sval或整数lval
- len,encoding+data的总长度;
listpack 没有压缩列表中记录前一个节点长度的字段了,listpack 只记录当前节点的长度,当我们向 listpack 加入一个新元素的时候,不会影响其他节点的长度字段的变化,从而避免了压缩列表的连锁更新问题。
相比 ziplist,listpack 去除了到尾部节点,也就是到 entryN 的偏移量,但保留了其他属性。
获取最后一个节点
虽然 listpack 没有了指向尾部节点的偏移量,但是同样可以快速找到 listpack 的尾部节点,方式是通过 总字节长度属性的值,可以直接获取到 listpack 的尾部,然后根据 entry 元素尾部的 length 属性,就可以找到尾部 entry 的起始地址了。
QuickList
通过控制 quicklistNode 结构里的压缩列表的大小或者元素个数,来减少连锁更新带来的性能影响,但是并没有完全解决连锁更新的问题。
Redis 3.0, quicklist = list + ziplist
quicklist 就是一个链表,而链表中的每个元素又是一个 ziplist。
Redis 7.0, quiclist = list + listpack
压缩列表的不足,虽然压缩列表是通过紧凑型的内存布局节省了内存开销,但是因为它的结构设计,如果保存的元素数量增加,或者元素变大了,压缩列表会有「连锁更新」的风险,一旦发生,会造成性能下降。
quicklist 解决办法,通过控制每个链表节点中的压缩列表的大小或者元素个数,来规避连锁更新的问题。因为压缩列表元素越少或越小,连锁更新带来的影响就越小,从而提供了更好的访问性能。
结构
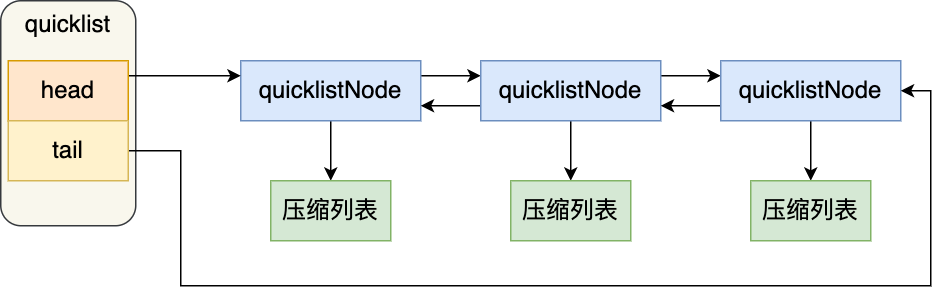
quicklist 的结构体跟 list 的结构体类似,都包含了表头和表尾,区别在于 quicklist 的节点是 quicklistNode。
typedef struct quicklist {
//quicklist的链表头
quicklistNode *head; //quicklist的链表头
//quicklist的链表尾
quicklistNode *tail;
//所有压缩列表中的总元素个数
unsigned long count;
//quicklistNodes的个数
unsigned long len;
...
} quicklist;quicklistNode 的结构定义:
typedef struct quicklistNode {
//前一个quicklistNode
struct quicklistNode *prev; //前一个quicklistNode
//下一个quicklistNode
struct quicklistNode *next; //后一个quicklistNode
// quicklistNode 指向的压缩列表,
// Redis7是entry指向listpack
unsigned char *zl;
//压缩列表的的字节大小
unsigned int sz;
//压缩列表的元素个数
unsigned int count : 16; //ziplist中的元素个数
....
} quicklistNode;