Machine Perception
Machine Perception
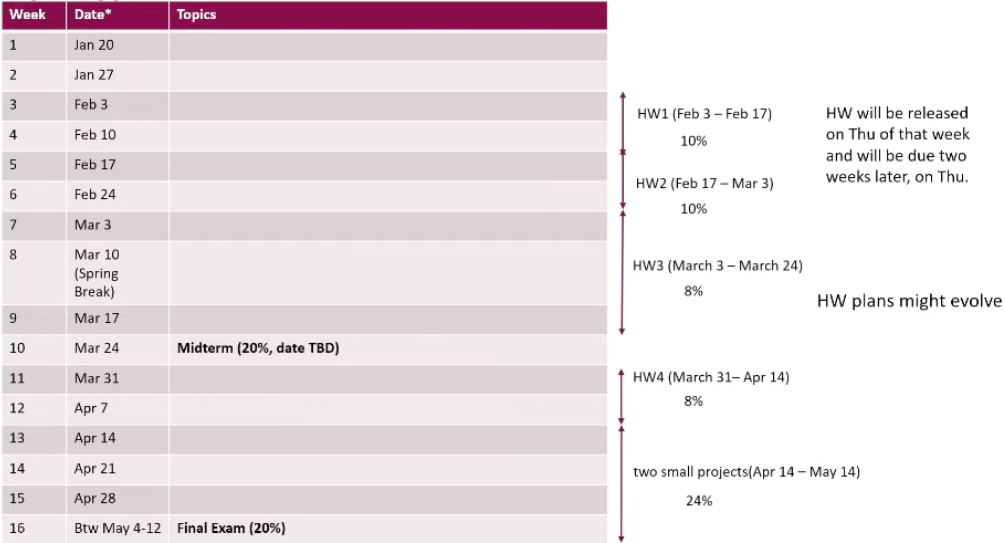
- 4x Homeworks: 36%
- HW1 10%
- HW2 10%
- HW3 8%
- HW4 8%
- This semester we are using the Penalty-free 5 late days policies which students can choose how to allocate their time. In the case that students have already used all their penalty free late days, they will take fractional penalty based on how late they submitted. For example: 5 hours = total scores * (1 - 5/24 * 20%)
- Midterm: 20%
- Final Exam: 20%
- Small Projects: 24%
- Possible bonus for extensive in-class participation (up to 5%)
I need your interaction and questions. Do not let the communication become one-way! Interrupt at any time.
Lenient letter grades. The only way to fail this class is to violate the honor code (cheat, plagiarize)
Zero Tolerance. Think before you act: One homework or one question in a midterm is unlikely to affect your final letter grade.
- The only way to fail this class is to violate honors code (cheat, plagiarize)
- Zero Tolerance. Think before you act: The chance that one homework or one question in a midterm affects your final letter grade is epsilon.
- Learning Outcomes:
- Firm knowledge of geometric fundamentals of computer vision including recent developments (NeRFs)
- Understand challenges, why algorithms work or do not work
- Perform as a vision engineer in vision and robotics companies
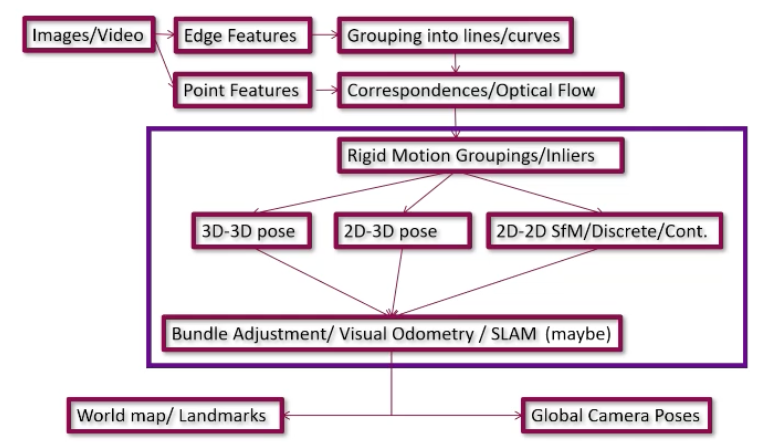
An introduction to the problems of computer vision and other forms of machine perception that can be solved using geometrical approaches rather than statistical methods. Emphasis will be placed on both analytical and computational techniques. This course is designed to provide students with an exposure to the fundamental mathematical and algorithmic techniques that are used to tackle challenging image based modeling problems. The subject matter of this course finds application in the fields of Computer Vision, Computer Graphics and Robotics. Some of the topics to be covered include: Projective Geometry, Camera Calibration, Image Formation, Projective, Affine and Euclidean Transformations, Computational Stereopsis, and the recovery of 3D structure from multiple 2D images. This course will also explore various approaches to object recognition that make use of geometric techniques, these would include alignment based methods and techniques that exploit geometric invariants. In the assignments for this course, students will be able to apply the techniques to actual computer vision problems. This course is appropriate as an upper-level undergraduate CIS elective. A solid grasp of the fundamentals of linear algebra. Some knowledge of programming in C and/or Matlab
- Geometry
- Appearance
- Motion
- Deformation
Reconstruction of Real-world Dynamic scenes.
Image Synthesis of Real-world Scenes with 3D Control.
Large-scale 3D Scene Generation